Heye Vöcking is a senior data engineer and independent AI-alignment researcher. He specialises in converting data into actionable knowledge, stress-testing large language models, and designing scalable knowledge-graph architectures.
- LLM Alignment & Safety
- Knowledge Graph Engineering
- AI-Augmented Interfaces
- Distributed & Real-Time Systems
- Mechanistic Interpretability
- Bitcoin & Austrian Economics
M.Sc. Computer Science
Technical University of Berlin
M.Sc. Computer Science (exchange)
上海交通大学 Shanghai Jiao Tong University
B.Sc. Informatik (Computer Science)
University of Hamburg
Academic work and research contributions
A TypeScript/JavaScript library and server-side component that shifts age- and gender-segment prediction into the user’s browser, ensuring all sensitive data remains on-device and on ly anonymous segment labels are sent back to the ad server. By training an L1-regularized logistic regression model on a real-world RTB dataset, Bluestreak improves age-segment accura cy by 4 pp and gender accuracy by 2 pp over a User-Agent-based baseline, without relying on cookies or fingerprinting and adding minimal load-time and resource overhead. Fully GDPR-co mpliant and compatible with >95 % of modern browsers, it delivers privacy by design while preserving ad-targeting precision.
Mar 1, 2021
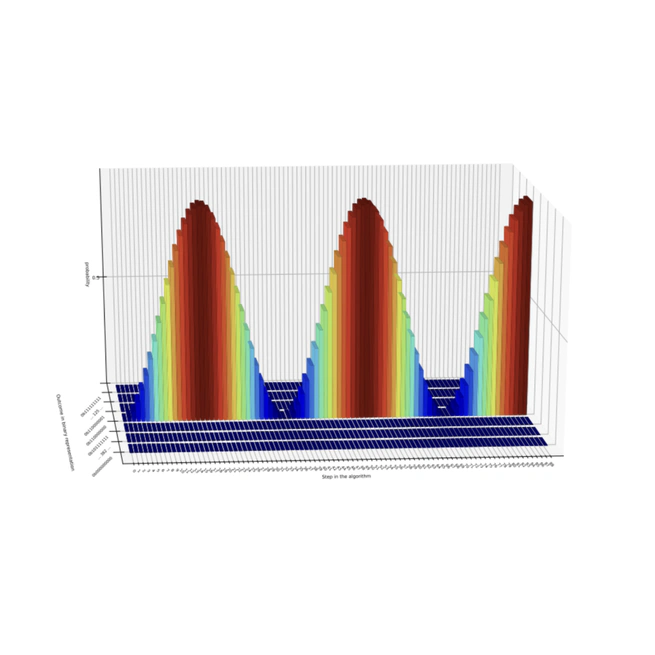
We used a simulated quantum computer to compare the performance of Grover’s search algorithm with a faster version proposed by Ozhigov. We discussed Ozhigov’s algorithm, provided an implementation, and analyzed its expected running times to confirm the claimed speedup.
Jun 13, 2020
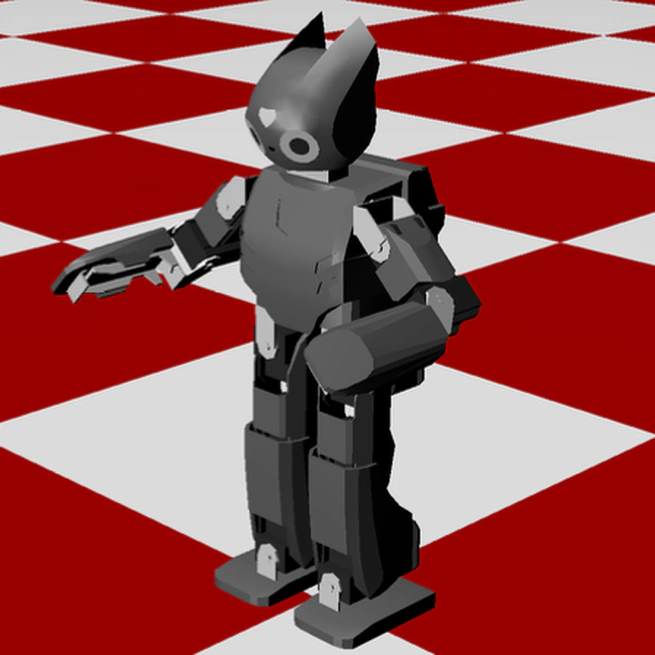
Evolving Locomotion for a Humanoid Robot is a bachelor’s thesis that presents an automated evolutionary framework for generating walking gaits on the DARwIn-OP platform. By encoding continuous-time recurrent neural networks (CTRNNs) as genotypes and leveraging a distributed Webots simulation infrastructure, the work explores oscillatory pattern generation, sensorimotor feedback integration, and the minimal hidden-layer requirements, demonstrating that at least four hidden neurons are essential for stable bipedal locomotion. The resulting system efficiently parallelizes tens of thousands of trials to evolve robust, transferable walking behaviors without manual tuning of control parameters.
Mar 1, 2013